Slew Limits and Targets
Use the Slew Limits and Targets tab to define rate and acceleration limits for the slew modes, as well as targets to be used as Tracking Reference Objects. The Slew/Target Definition list is on the left side of the tab, and it enables you to add, copy, edit, or delete a particular definition. At least one of each definition type always exists.
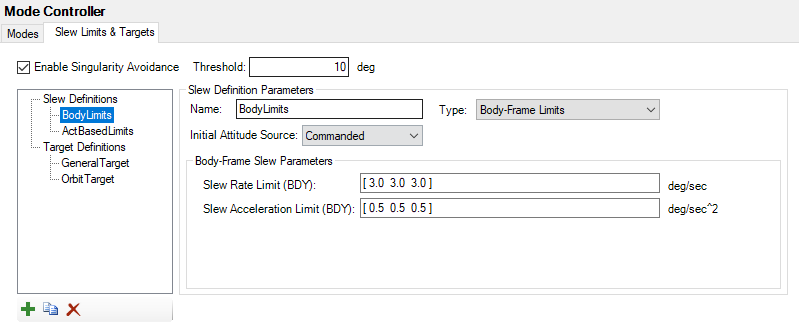
SOLIS blocks you from pointing and clocking to the same vector, but there are scenarios where different, valid vectors can become coaligned (a singularity). These result in nondeterministic attitude commands that can cause large or infinite rate commands. By selecting the Singularity Avoidance checkbox, SOLIS will smoothly transition the alignment and clocking vectors to within the specified threshold if a singular condition is detected.
Slew Definition Parameters
Use the Slew Definition Parameters panel to define the limits of a slew's rate and acceleration. SOLIS has three ways to define these slew limits, which are detailed in the sections below. All slews have the following parameters:
| Slew Parameters | Description |
|---|---|
| Name | Enter a name that helps identify the slew limit when used elsewhere in SOLIS. |
| Type | Defines the type of slew limit: Body-Frame Limit, Scalar Limits, and Actuator-Based Limits. See the details below. |
| Initial Attitude Source | Defines the source of the initial attitude.
|
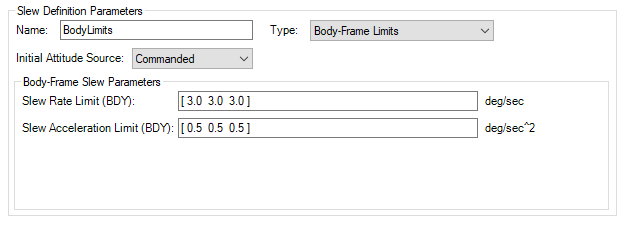
Body-Frame Limits
Body-Frame Limits slews are simply slew rates and accelerations defined in the BDY frame. These form a "3-D Cube" aligning with the BDY axis, which can be a poor representation of true agility for configurations like a four-wheel pyramid.
| Slew Parameters | Definition | Units |
|---|---|---|
| Slew Rate Limit (BDY) | 3x1 vector that defines the maximum slew rate in each of the 3 BDY axes | deg/s |
| Slew Acceleration Limit (BDY) | 3x1 vector that defines the maximum slew acceleration in each of the 3 BDY axes | deg/s2 |
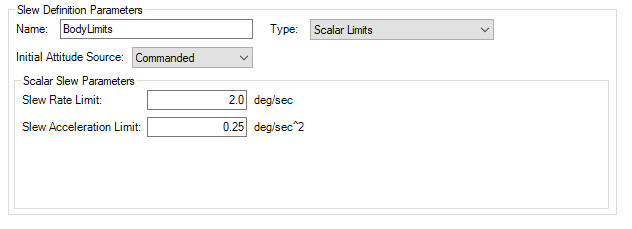
Scalar Limits
Scalar slew limits define the maximum total slew rate and accelerations. This is essentially a sphere.
| Slew Parameters | Definition | Units |
|---|---|---|
| Slew Rate Limit (BDY) | Scalar value that defines the maximum total slew rate allowed | deg/s |
| Slew Acceleration Limit (BDY) | Scalar value that defines the maximum total slew acceleration allowed | deg/s2 |
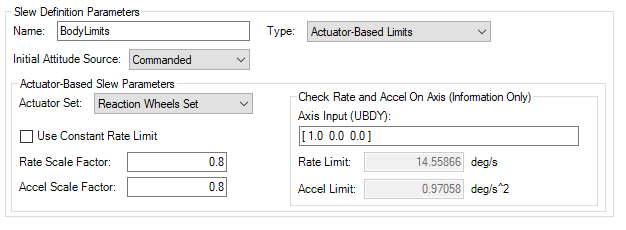
Actuator-Based Limits
Actuator-Based Limitsenables you to define slew limits based on the performance limitations of the selected Actuator Set.
| Slew Parameters | Definition |
|---|---|
| Actuator Set | Select an actuator set to define the limits. Actuator sets must exist for this to be a valid slew limit. You cannot delete the selected actuator set from the Actuators page if it is in use here. |
| Use Constant Rate Limit | Set a maximum rate limit for the spacecraft. This is typically used when the actuator set is thrusters, since thrusters have "Momentum Capacity". |
| Rate/Accel Scale Factor | Using values between 0.0 and 1.0, you can limit the rate and acceleration in a slew to some fraction of the maximum capability of the actuator set. SOLIS is able to compute the maximum rate or acceleration that an actuator set is capable of about a given axis based on the actuator set parameters and the spacecraft's inertia. These are typically set around 0.8 to provide some remaining capability to reject disturbances. |
| Check Rate and Accel on Axis (Information Only) | This box lets you see the SOLIS computed maximum rate and acceleration capabilities of the spacecraft in any axis you provide. It is meant to help you determine what rate or acceleration limits are acceptable. |
Target Definitions
Target Definitions are used to define the type of target to track. SOLIS has four methods for target tracking, defined below.
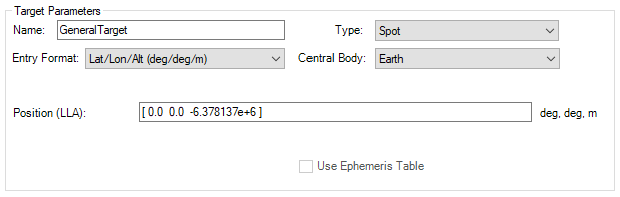
Spot
Spot targets are defined as single targets on the surface of a Central Body. You can alter the properties of the target object via the command (EPH_SET_SPOTTGT) to move the target object around.
You can select a desired entry format from the following options:
- Lat/Lon/Alt (deg/deg/m)
- Lat/Lon/Alt (rad/rad/m)
- CBF (m)
- Centric Lat/Lon/Alt (deg/deg/m)
- Centric Lat/Lon/Alt (rad/rad/m)
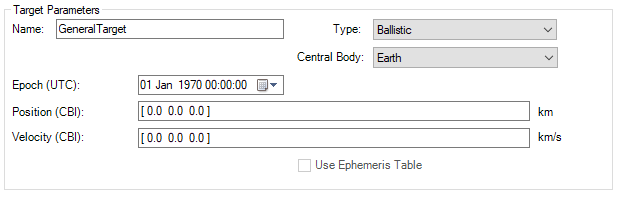
Ballistic
Ballistic targets give you the ability to track satellites or other objects in orbit around the same central body or other central bodies. To define a Ballistic target, simply provide an epoch (UTC) time and the corresponding position and velocity (CBI) vectors. You can update Position-Velocity-Time values using the EPH_ADD_BALLISTICTGT_ENTRY command.
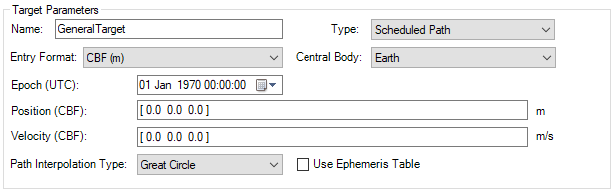
Scheduled Path
Scheduled Path targets are defined by one or more position/velocity waypoints for tracking a moving object, e.g., a truck, ship, or plane. You can add more waypoints using:
- Target configuration in
FSW_UnitSpecific.cfgfile - Ephemeris'
EPH_ADD_SCHEDPATHTGT_WPTcommand
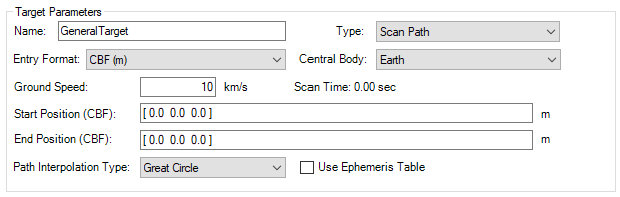
Scan Path
Scan Path targets are defined as scans on the surface of a Central Body. specifically, they are defined by a ground speed, interpolation type, and start and end positions. You can alter the properties of the target object via command (EPH_ADD_SCANTGT_POINT) to move the target object around.
| Interpolation Type | Definition |
|---|---|
| Lat/Lon/Alt | This is a linear interpolation of latitude, longitude, and altitude. It is simple but never the shortest path, especially near the poles, and it will not cross the prime meridian. |
| XYZ | This is a linear interpolation between two cartesian points. This is the simplest, but a more oblique view angle to the central body's surface causes a more curved path. |
| Great Circle (default) | Draws a great circle, which is the shortest distance between two points on a sphere. It is simple and very near the actual shortest distance. |
| Oblate Spheroid | Draws the shortest distance on an oblate spheroid. It's the most accurate, but it is also the most complex, requiring an iterative solution every frame. |